|
I am currently a Silicon Design Engineer at AMD. I completed my Master of Applied Science at the University of Toronto, where I was advised by Andrew Goldenberg and conducted research in the Robotics and Automation Laboratory. I previously served as a Research Intern at the Surgical Imaging and Mechatronics Laboratory under the supervision of Jayender Jagadeesan at Brigham and Women's Hospital and Harvard Medical School. I also completed my Undergraduate Thesis at the Continuum Robotics Laboratory, under the guidance of Jessica Burgner-Kahrs at the University of Toronto Robotics Institute. In addition, I was formerly a Undergraduate Researcher at the Microfluidics and BioMEMS Laboratory, where I worked under the mentorship of Xinyu Liu. Email / CV / LinkedIn / Google Scholar / GitHub |
|
|
|

|
Faculty of Applied Science and Engineering, University of Toronto Sep 2022 - Apr 2025 | Toronto, ON, Canada |
|
|
Faculty of Applied Science and Engineering, University of Toronto Sep 2017 - Apr 2022 | Toronto, ON, Canada |
|
I am interested in the sensing, modeling, and control of soft and medical robots utilizing machine learning. Compared to the rigid mechanical structure of conventional robots, the inherent compliance and flexibility of soft robots enable them to travel in confined spaces and manipulate objects in complex environments. In medical applications, such robots provide clinicians with the ability to administer less invasive treatments at a reduced cost and higher efficiency. |
|
|
|
|
Binbin Ying, Ryan Zeyuan Chen, Runze Zuo, Jianyu Li, Xinyu Liu Advanced Functional Materials, 2021 Videos: HMI, Soft Robot / News: U of T News, U of T Engineering News A novel hydrogel-based ionic skin with demonstrated applications in wearable sensing, human-machine interaction and soft robotics. |
|
|
|
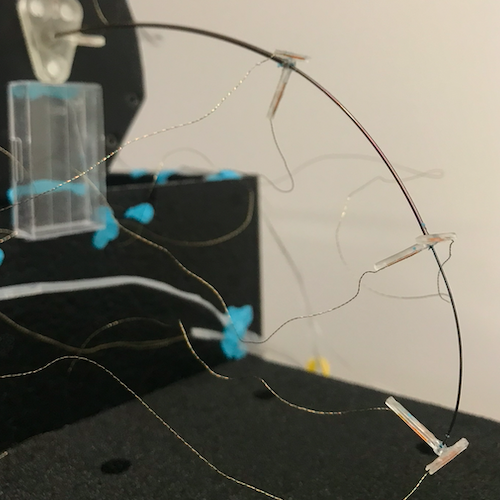
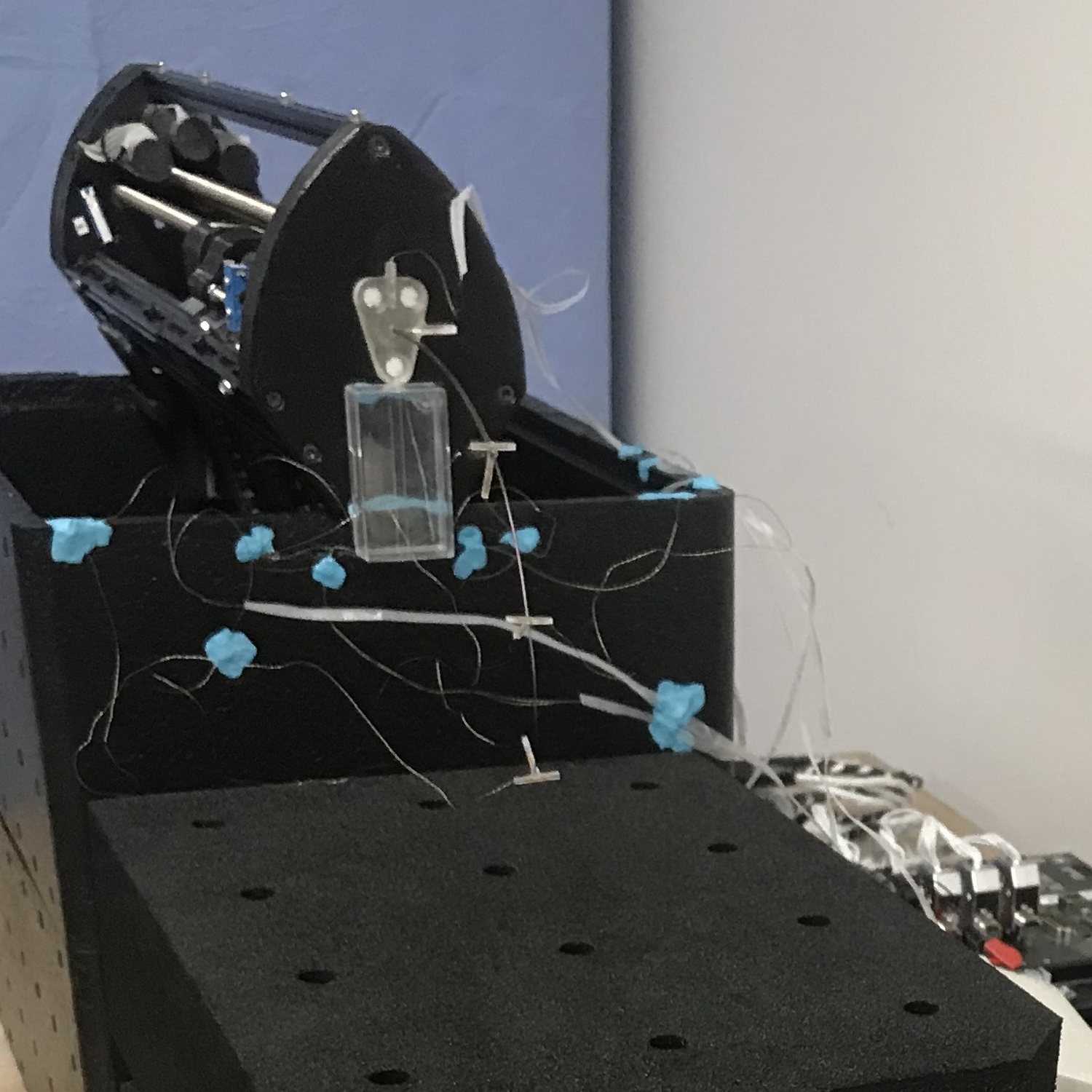
Reinhard M. Grassmann, Ryan Zeyuan Chen, Nan Liang, Jessica Burgner-Kahrs Workshop on Learning from Diverse, Offline Data (L-DOD), 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 IROS / RSS L-DOD / Dataset The first public dataset of a three-tube concentric tube continuum robot, accompanied by benchmark results for learning the forward kinematics using a feedforward neural network. |
|
I have worked on a wide range of interesting and challenging projects within the domains of robotics and machine learning.
|
|
|
MIE1076 Artificial Intelligence for Robotics II, University of Toronto Final Report The design and implementation of a tendon-driven continuum robot for efficient detection and removal of cancerous polyps in the large colon. |
|
|
MIE1075 Artificial Intelligence for Robotics I, University of Toronto Final Report / Code The design and implementation of an intelligent dog walking robot with real-time visual dog tracking, dog following, and dog waste disposal capabilities. |
|
|
ROB498 Robotics Capstone Design, University of Toronto Final Report / Presentation The design and implementation of an intelligent robotic shopping cart with customer following, shopping guide, and auto-checkout features. |

|
APS360 Applied Fundamentals of Machine Learning, University of Toronto Final Report / Presentation / Code The recognition of wine grape variety through wine taste descriptions utilizing the long short-term memory (LSTM) neural network model. |
|
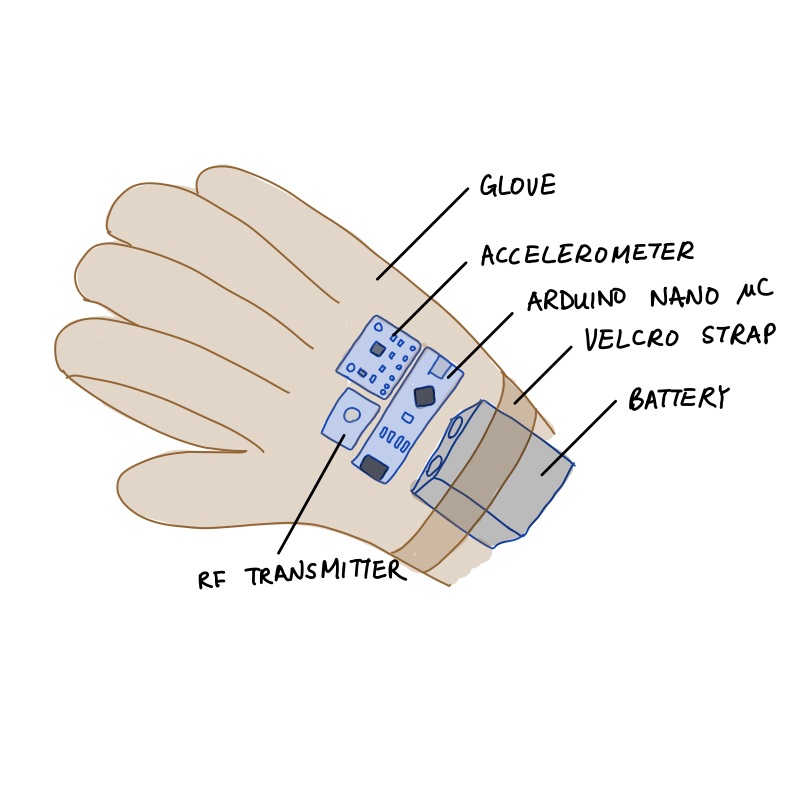
MIE438 Microcontrollers and Embedded Microprocessors, University of Toronto Final Report The design of a gesture controlled claw machine facilitated by a wearable device, as an alternative to traditional joystick control. |
|
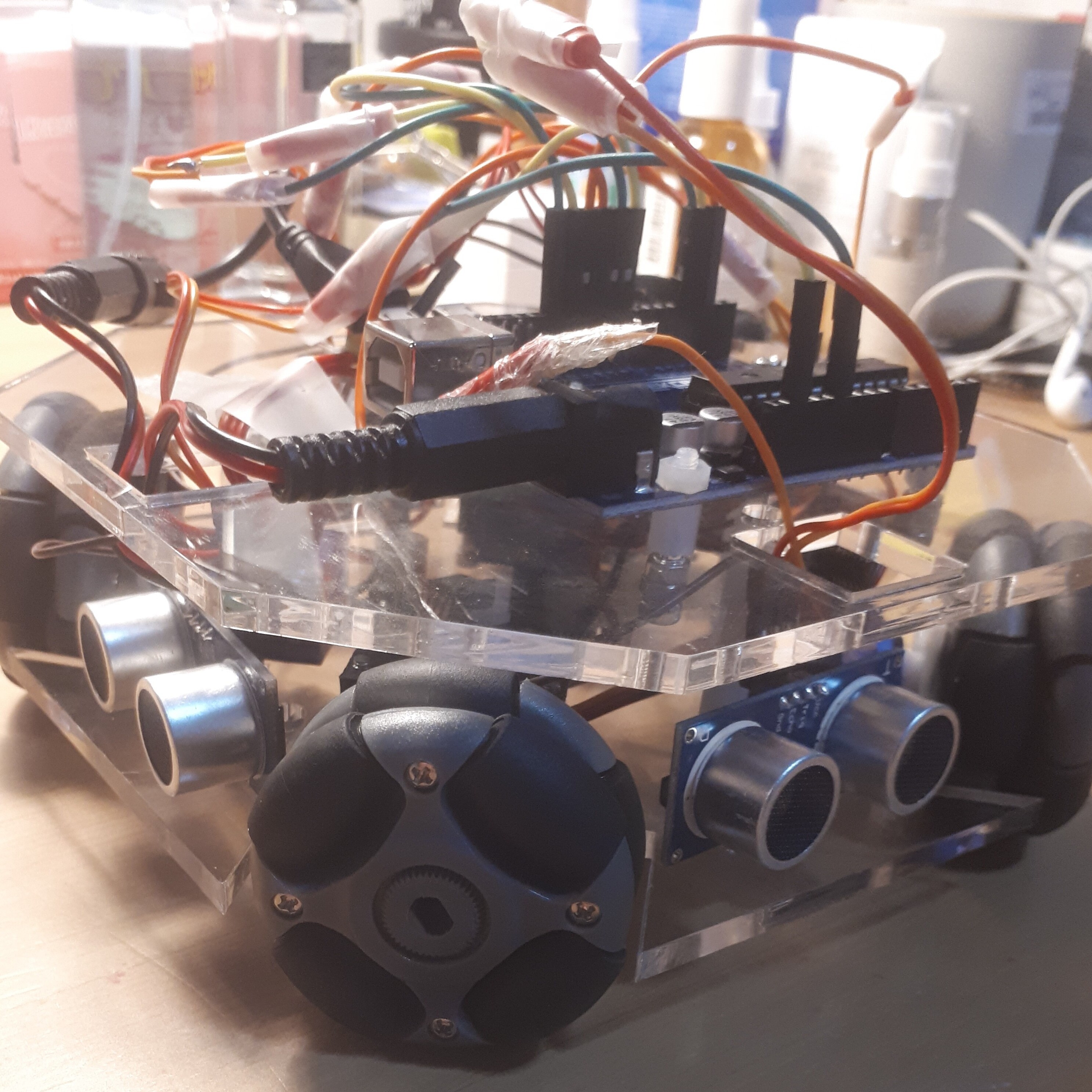
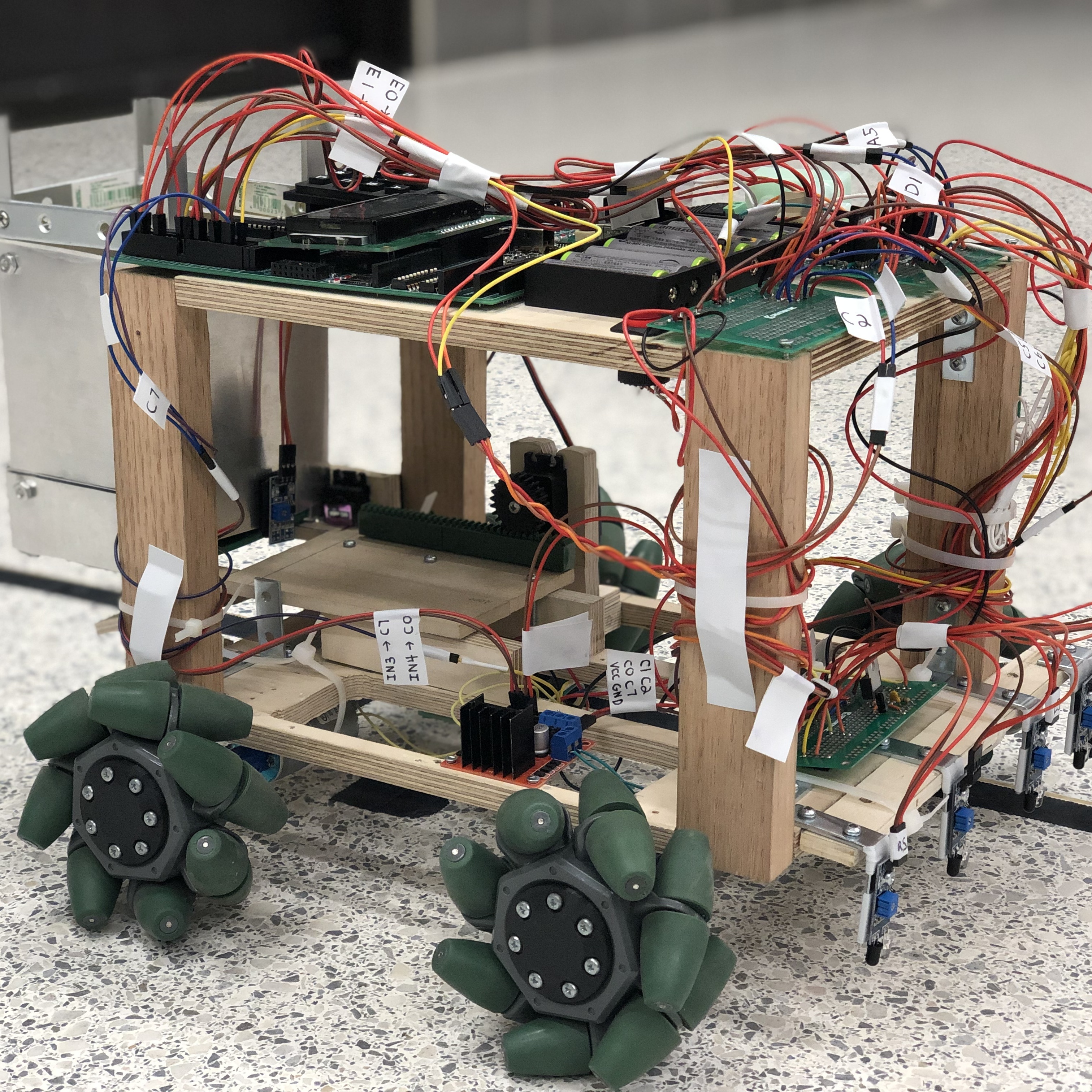
University of Toronto Robotics Association Competition Details The design and construction of an autonomous robot for the PacBot competition hosted by the Harvard Undergraduate Robotics Club, mimicking the traditional Pac-Man game in a physical arena. Organized and led weekly meetings with team members, focusing on the design and implementation of circuits and sensors for the robot as the electrical team lead. |

|
ROB301 Introduction to Robotics, University of Toronto Final Report / Code The design of a control system, based on Bayesian-localization techniques, for the TurtleBot 3 Waffle Pi robot to deliver mail to arbitrarily chosen stations on a closed-loop route. |
|
AER201 Engineering Design, University of Toronto Final Report / Video The design and fabrication of a scaled-down, proof-of-concept prototype of a mobile platform that can travel along a designated lane and deploy traffic cones. |